實驗名稱
編碼器原理的結構,以機械式元件做為介紹
實驗目的
因為每次使用馬達的時候,都一直無法準確的知道馬達轉動的角度,所以我們以機械式解碼器來了解此原理與結構。
在做此實驗的時候,我們第一想到控制機械手臂要怎麼樣才可以準確的夾到東西呢?要如何知道現在的角度?要怎麼樣才可以知道現在是正轉還是逆轉呢?
使用材料及設備


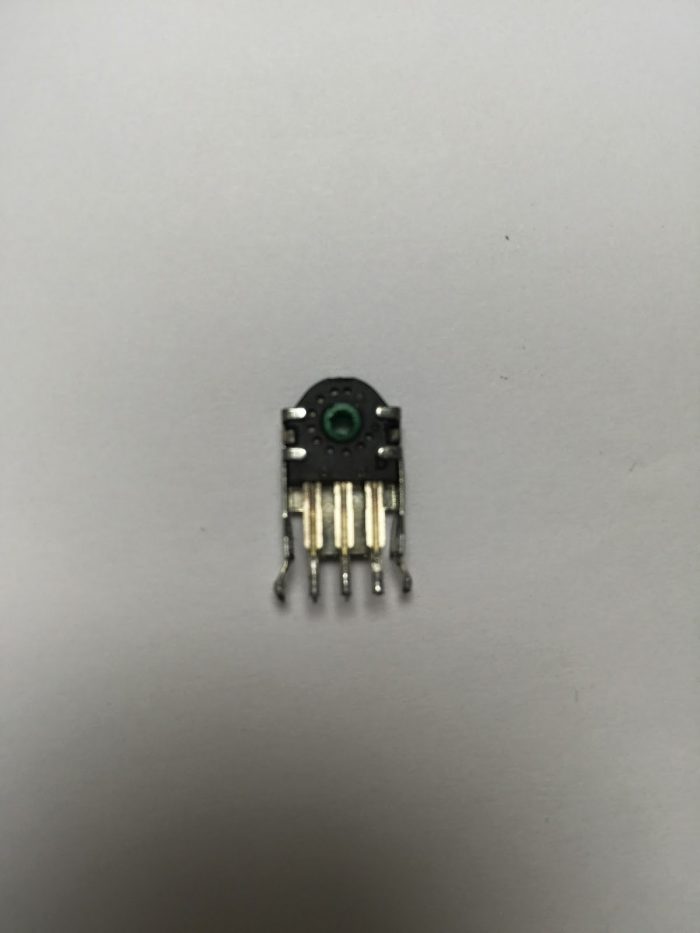
滑鼠分解下來後發現到裡面就有一樣可以實驗的利器。

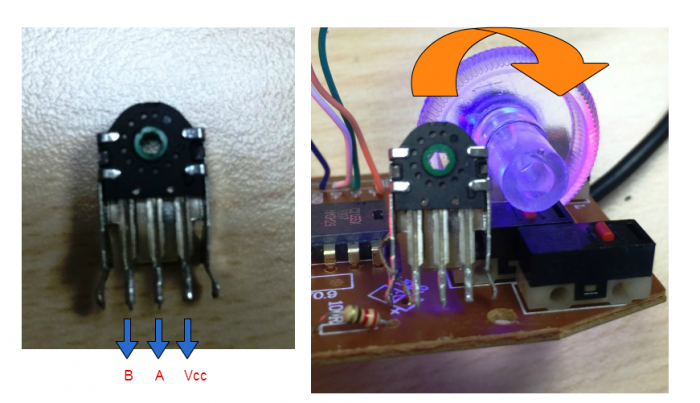
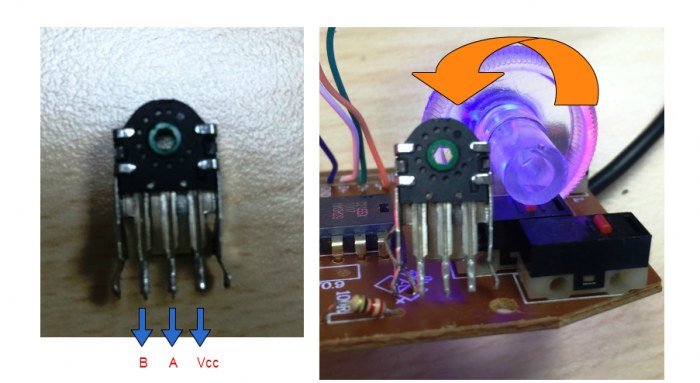
滑鼠編碼器滾輪,對應鼠標解碼器六角柱轉軸。
以上設備就是使用滑鼠上面所分解下來的編碼器,及滑鼠中間的滾輪做為測試使用。
原理介紹
以上兩種圖片對應,說明解碼器正轉與反轉的差別,如上圖所示來區分正轉與逆轉的方向。
功能說明
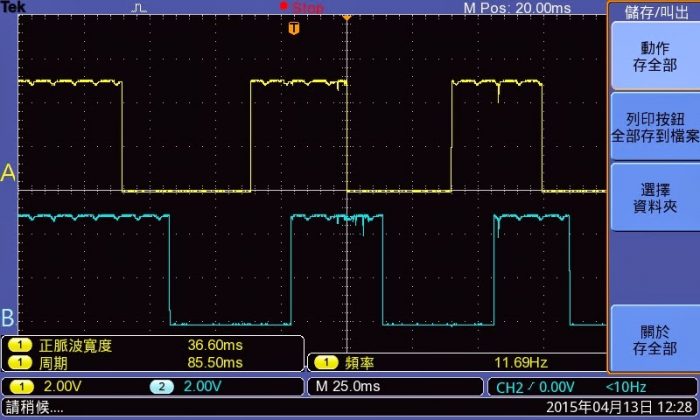
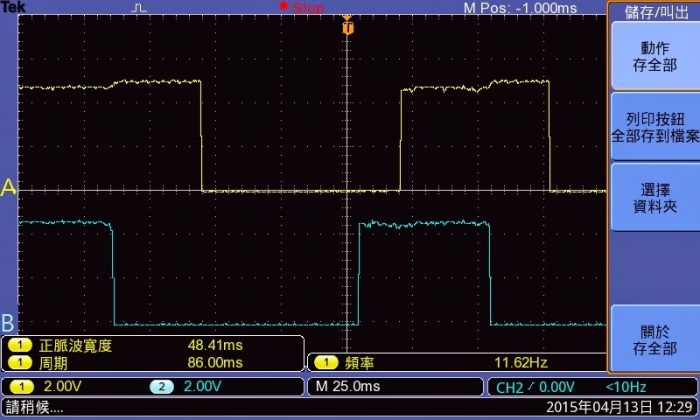
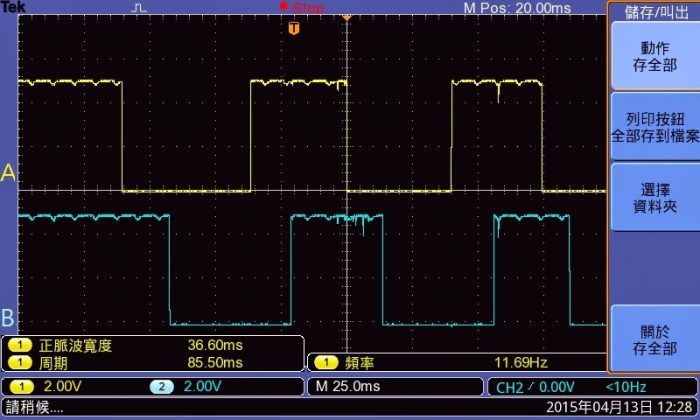
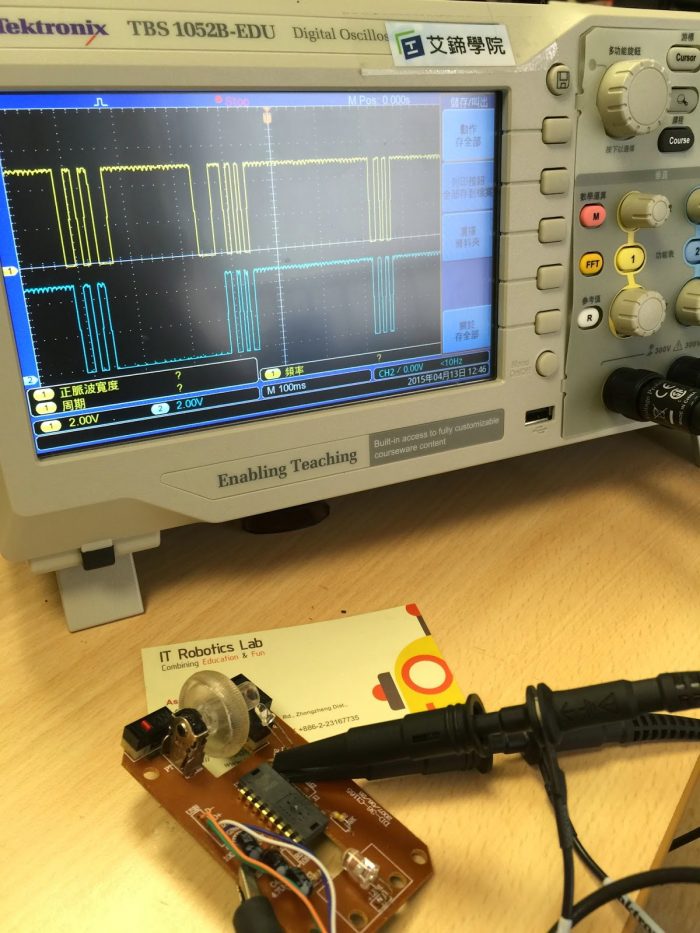
以下圖說明滑鼠滾輪逆轉方向時,A接點與B接點的相對變化。
由此波形圖可分析出事件1與事件2兩點,當逆時方向轉動的時候B點電壓先產生變化,由高電位到低電位,此時B點在低電位,A點在高電位,兩點電位不一樣的時候不會產生事件發生,當兩點在同電位時才會發生事件變化。
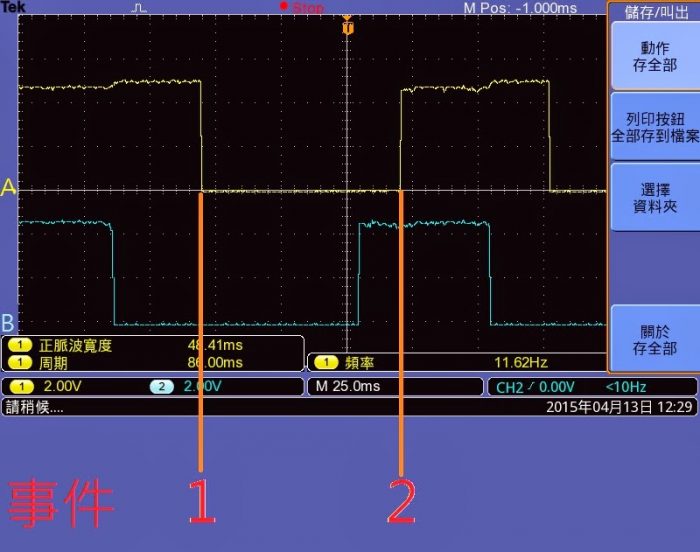
由此圖可見事件1與事件2兩點,在由兩點中間的距離換算出真實的時間值。
以下圖為例
事件1與事件2兩點的時間值換算,1大格顯示出25.0ms,圖上顯示事件1與事件2間格有2.5格,時間換算下來75ms轉動1次。
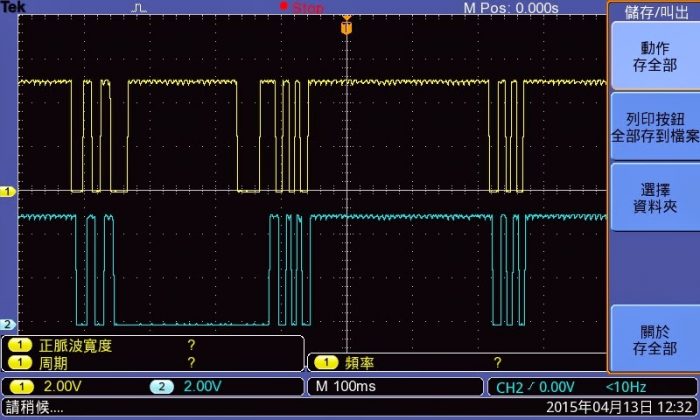
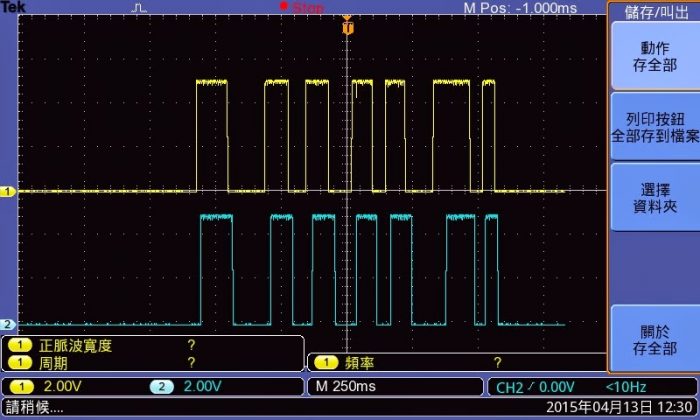
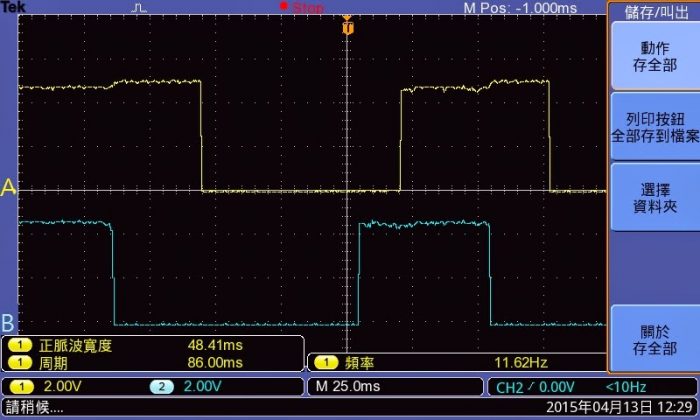
下圖所示快轉與慢轉時的波形圖。
執行結果
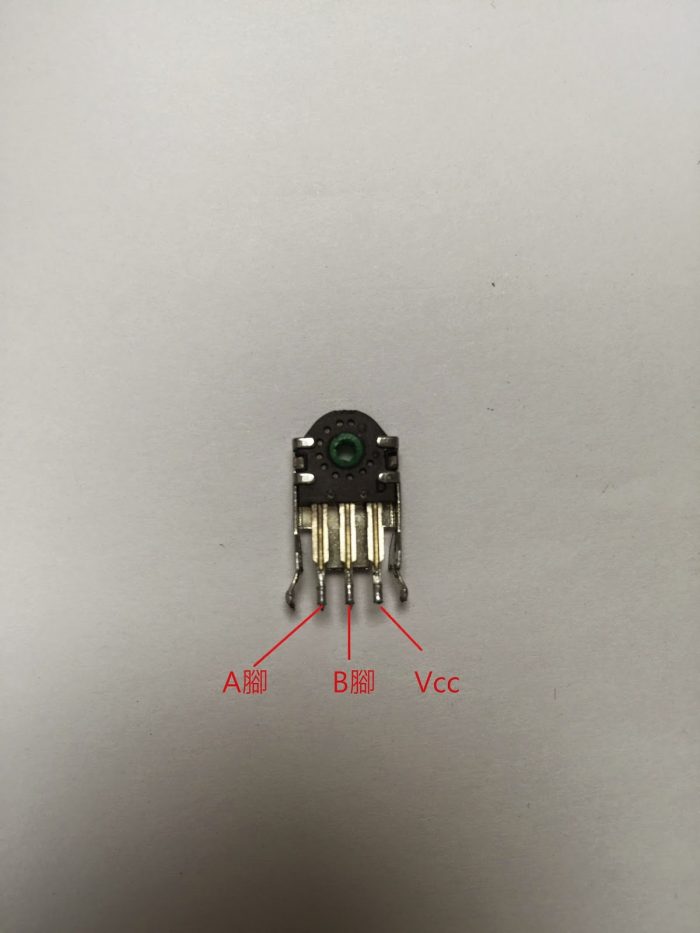
以下是執行結果,以示波器的應編碼器的A以及B腳位置。
結論
利用以上的資訊可以做出機械化編碼器,可利用在計算馬達正確轉動的角度。
因為機械式有解析度上限的問題,可以進階延伸光學式編碼器解決更精密的問題。
2019年1月29日
学习